Automatisiertes und vernetztes Fahren im Testfeld Dresden
9. Oktober 2019, Dresdner Flughafen
Nach intensiver Forschungs- und Entwicklungsarbeit wird automatisiertes und vernetztes Fahren auf der Straße sichtbar. Gemeinsam mit den Partnern der Projekte REMAS, HarmonizeDD, SYNCAR und AULA veranstaltete die Sächsische Energieagentur – SAENA GmbH am 9. Oktober 2019 im Konferenz-Center des Flughafens Dresden das Abschlussevent.
Herr Dr. Torsten Gründel, Abteilungsleiter am Fraunhofer IVI, gab in seinem Einführungsvortrag einen Überblick zur Forschungsinitiative »Synchrone Mobilität 2023« sowie zum Testfeld Dresden und stellte sich auf der Pressekonferenz den Fragen der interessierten Journalisten.
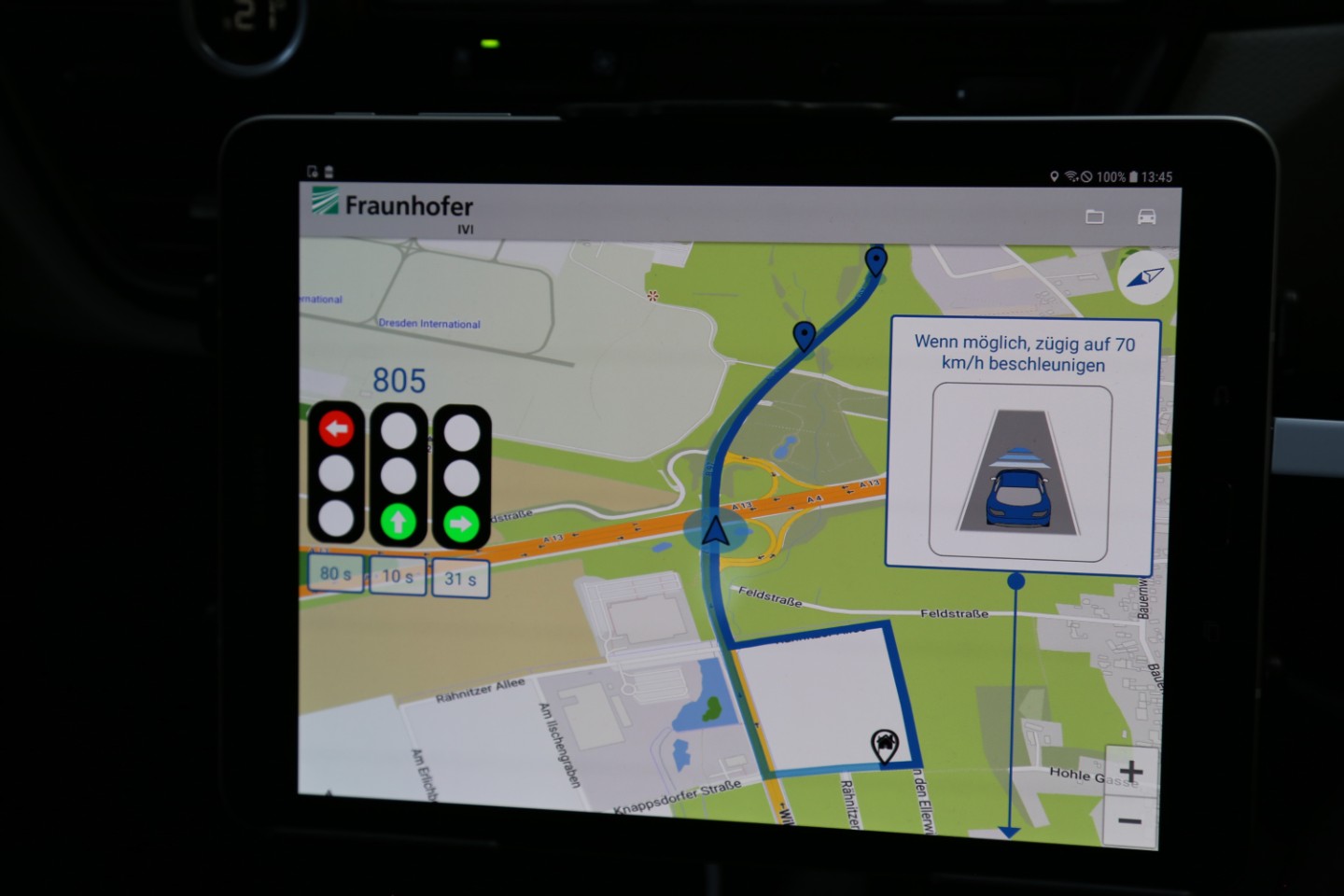
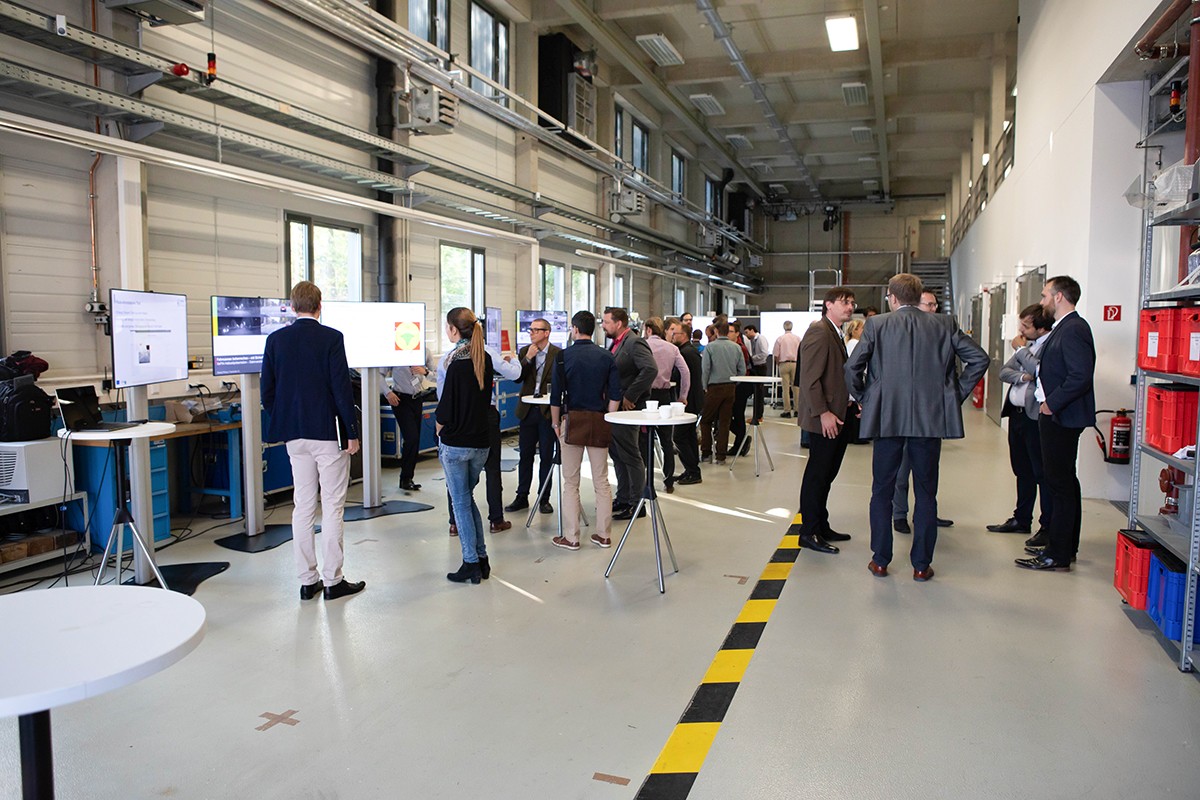
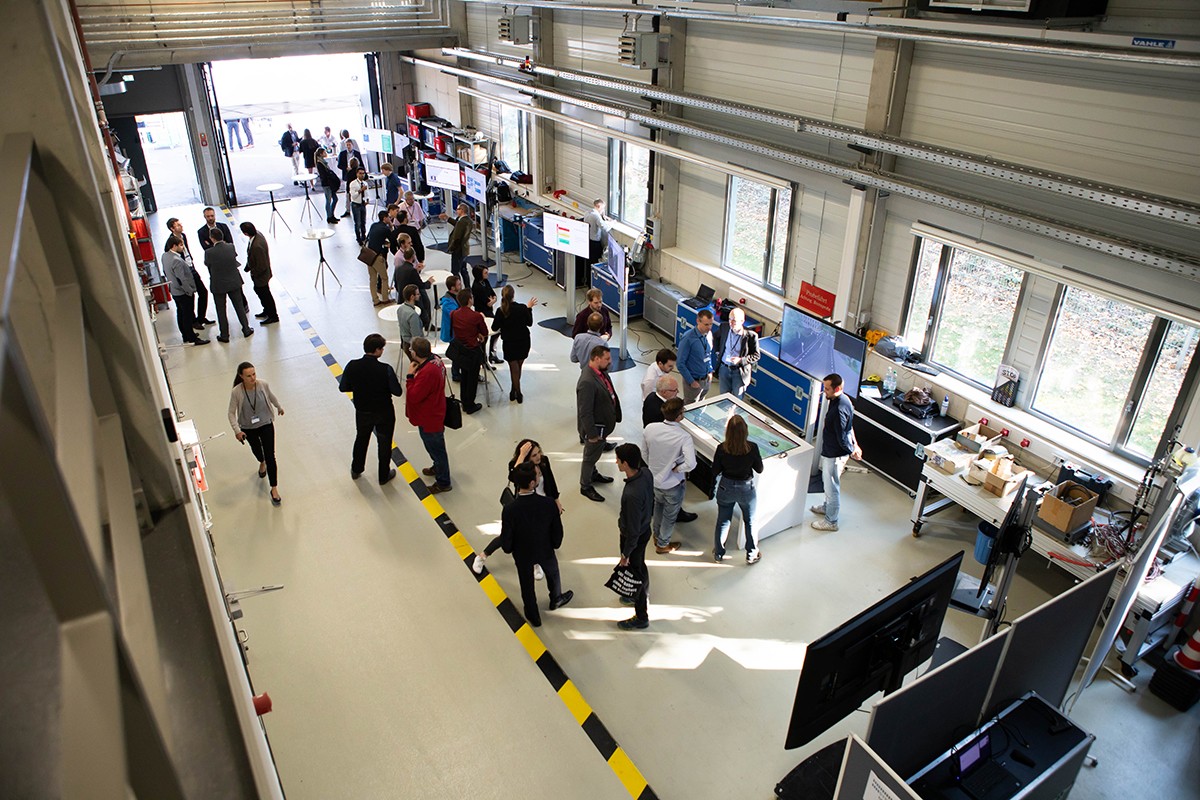
Im Zuge von Demofahrten im Rahmen der Veranstaltung wurden die Ergebnisse des vernetzten und automatisierten Fahrens auf dem Korridor Flughafen Dresden für eine breite Fachöffentlichkeit greifbar und erlebbar gemacht. Die begleitende Fachausstellung ermöglichte vertiefende Einblicke, z. B. in das Testfeld-Backend mit dem Management der Roadside Units oder in die Testplanung und das Monitoring der Versuchsfahrzeuge.
- weitere Informationen
- weitere Informationen
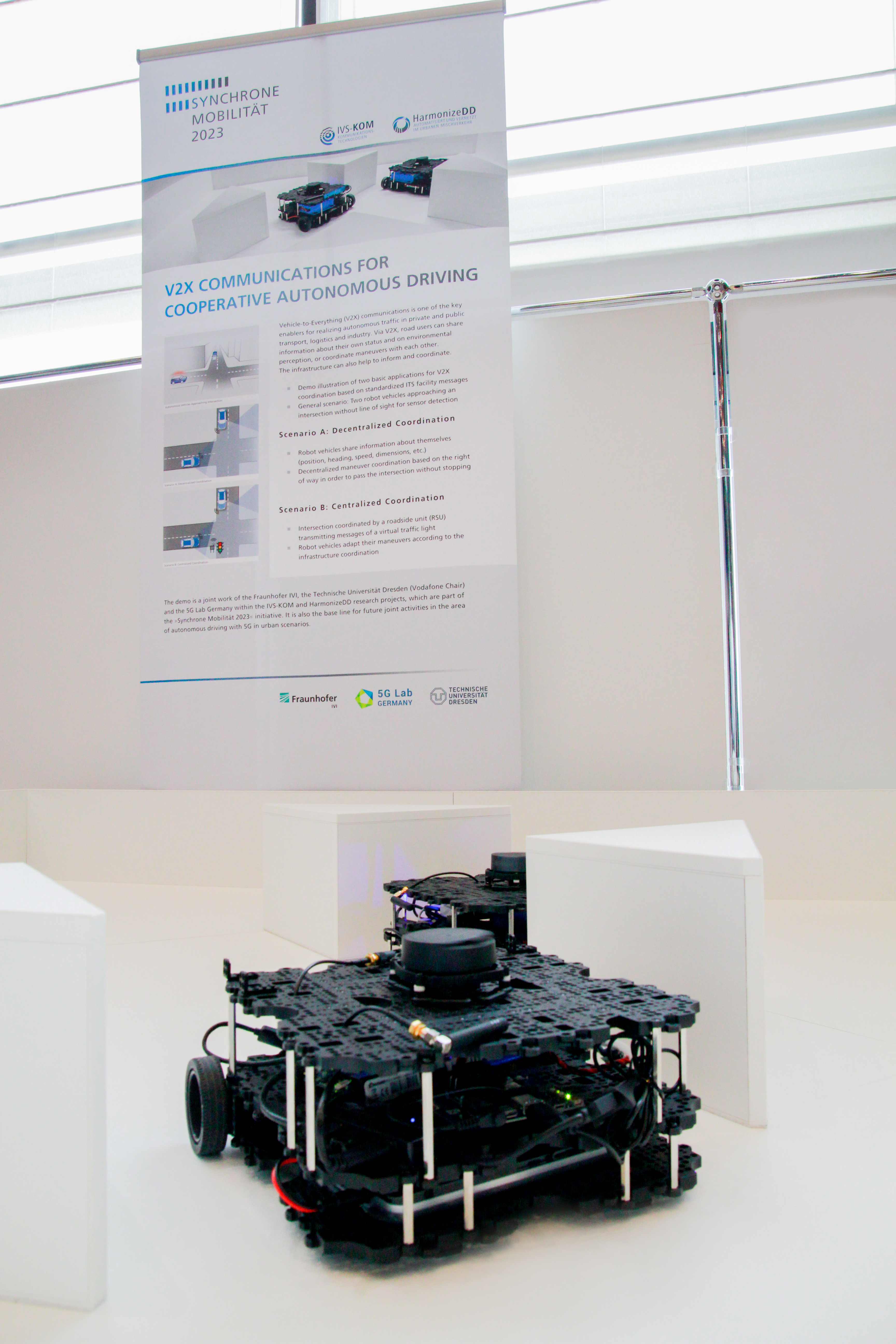
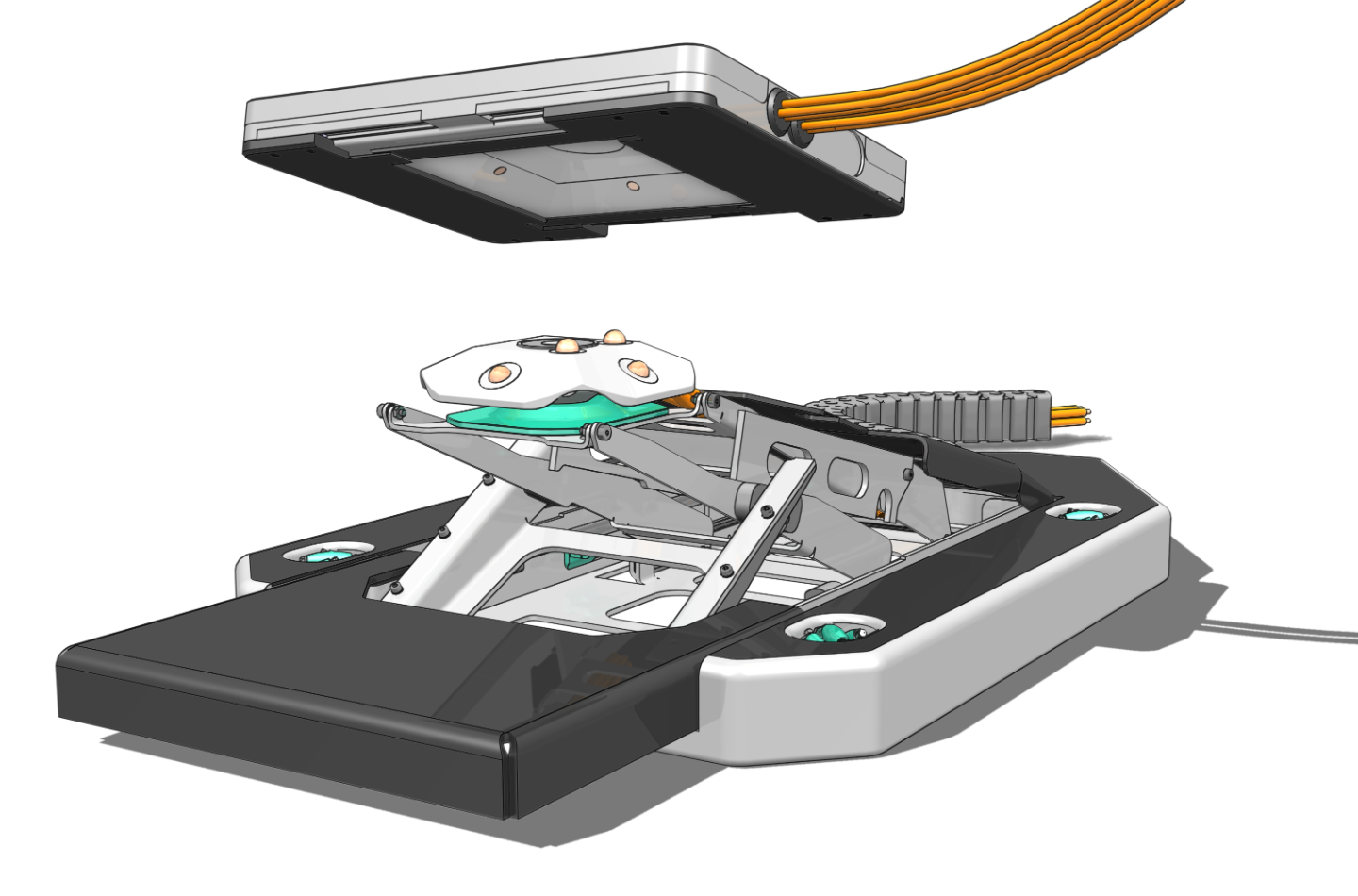
Zudem nutze das Institut die Gelegenheit, ein eigens entwickeltes automatisches Ladesystem für den privaten Bereich erstmals der breiten Öffentlichkeit zu präsentieren. Analog der innerhalb des Projekts AULA entstandenen Technologie für das automatisierte Nachladen mit hoher Leistung steht nun auch eine Version zur Verfügung, die sich in jeder Garage einfach installieren lässt und die identische Ladeschnittstelle am Fahrzeugunterboden zur Batterienachladung nutzt (Foto).